Práctica 14 - Servomotor mikroC PRO
Introducción
En esta práctica se implementa el control de giro de un servomotor usando el módulo PWM. El servomotor podrá girar a las siguientes posiciones: 0°, 90° y 180°.
Descripción
En esta práctica se implementa el control de giro de un servomotor usando el PWM del módulo X-TRAINER con el PIC18F4550/PIC18F45K50. El servomotor podrá girar en las siguientes posiciones: 0º, 90º, 180º.
Materiales:
1 x Módulo X-TRAINER. Manuales | Comprar
1 x Servomotor SG90.
1 x Juego de cable Dupont.
1 x Protoboard de 830 puntos.
1 x Cable micro USB.
Software:
Windows 7 o posterior.
MikroC PRO Compiler Descarga
MICROSIDE v1.0 Descarga
Procedimiento
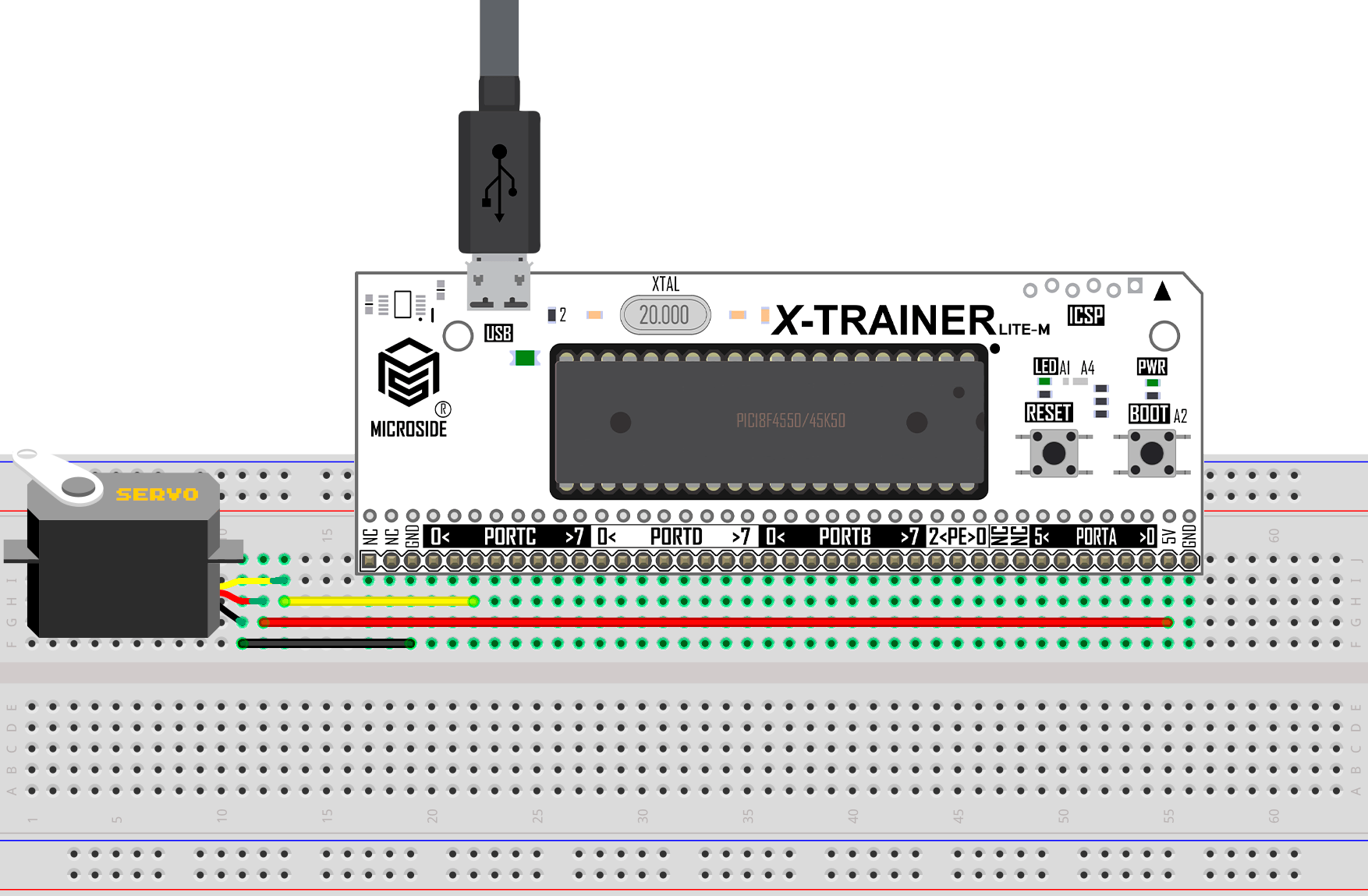
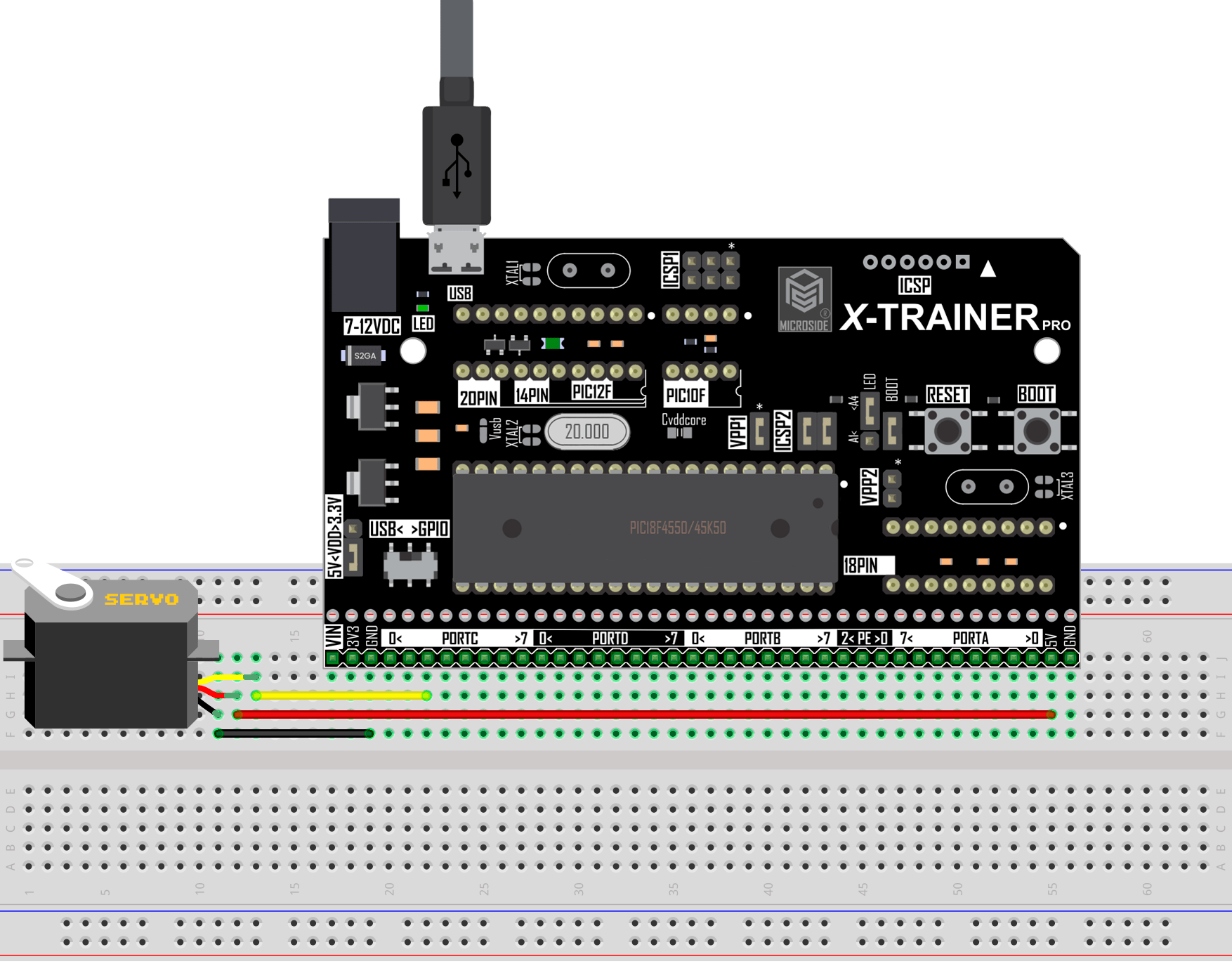
1. En el apartado de “Diagrama Esquemático”, que se encuentra a continuación, realiza las conexiones que se muestran en la imagen y conéctalo a la computadora. Nota: Las conexiones mostradas en los diagramas esquemáticos son las mismas ya sea que la tarjeta X-TRAINER posea el PIC18F4550/PIC18F45K50.
2. Al final de esta práctica, en el apartado de “Descargas”, puedes encontrar los archivos del código fuente.
3. Ejecuta MikroC PRO compiler, abre el archivo descargado y compila el programa. En el siguiente link encontrarás un manual para compilar en MikroC PRO compiler.
4. Abre el Software MICROSIDE v1.0 y programa el código que descargaste y compilaste en el módulo. En el siguiente link encontrarás el manual de usuario para el Software MICROSIDE v1.0.
5. Al terminar de programar, el módulo se reiniciará y el programa de esta práctica se ejecutará.
Diagrama esquemático


Código
Descargas
A continuación podrás descargar los archivos necesarios para el desarrollo de esta práctica.

