Práctica 13 - Servomotor CCS
Introducción
En esta práctica se implementa el control de giro de un servomotor usando el módulo PWM. El servomotor podrá girar a las siguientes posiciones: 0°, 90° y 180°.
Descripción
En esta práctica se implementa el control de giro de un servomotor usando el PWM del módulo X-TRAINER con el PIC16F887/PIC16F877A. El servomotor podrá girar en las siguientes posiciones: 0º, 90º, 180º.
Materiales:
1 x Módulo X-TRAINER. Manuales | Comprar
1 x Servomotor SG90.
1 x Juego de cable Dupont.
1 x Protoboard de 830 puntos.
1 x Cable micro USB.
Software:
Windows 7 o posterior.
PIC C Compiler v5.069 o posterior. Descarga
Tiny Bootloader Descarga
Procedimiento
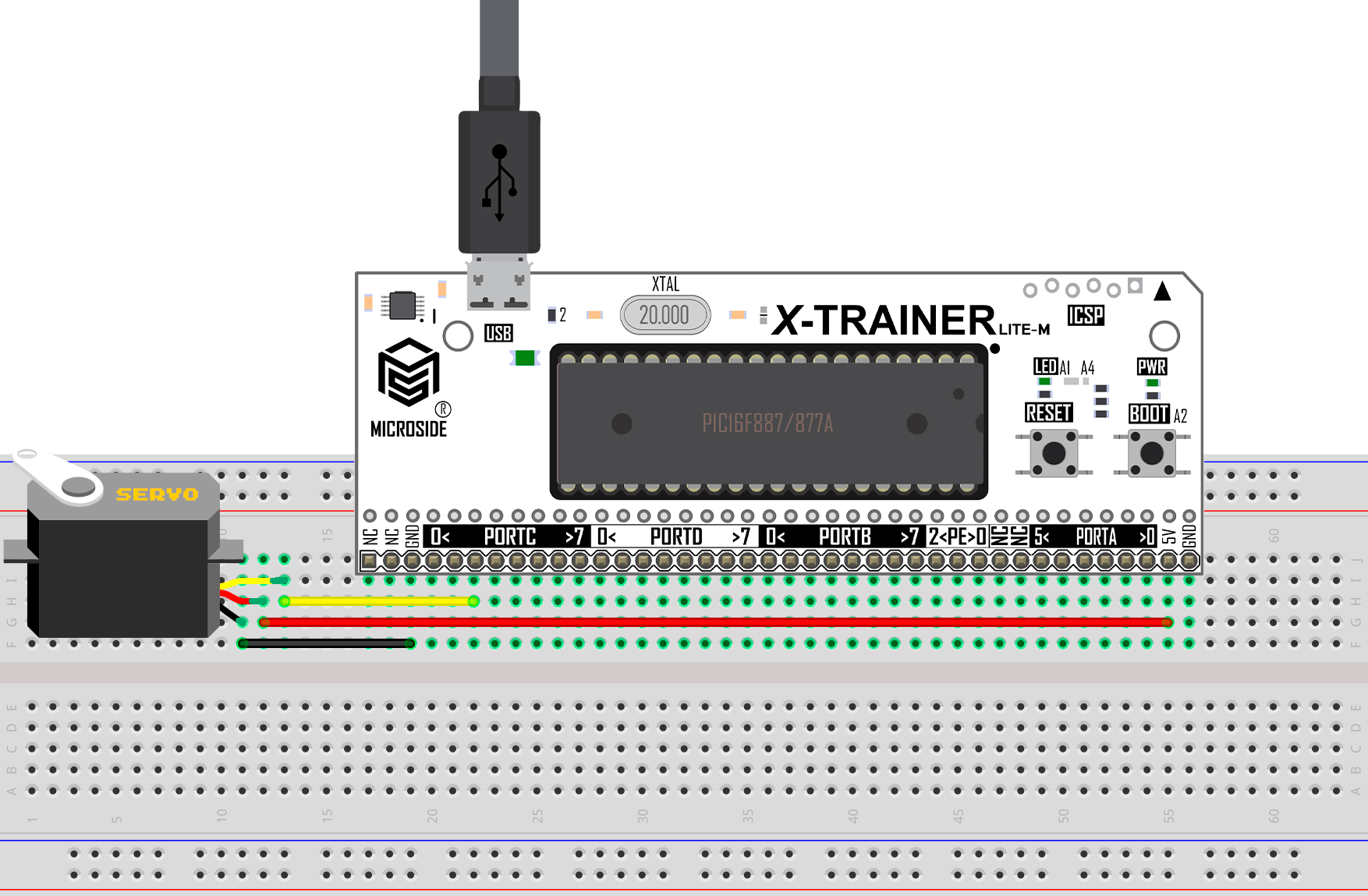
1. En el apartado de “Diagrama esquemático”, que se encuentra a continuación, realiza las conexiones que se muestran en la imagen y conéctalo a la computadora. Nota: Las conexiones mostradas en los diagramas esquemáticos son las mismas ya sea que la tarjeta X-TRAINER posea el PIC16F887/PIC16F877A.
2. Al final de esta práctica, en el apartado de “Descargas”, puedes encontrar los archivos del código fuente, o bien copiarlo del apartado de “Código” que se encuentra más abajo.
3. Si descargaste el archivo del paso 2, omite este paso. Si copiaste el código, abre el compilador, pega el código en un nuevo proyecto. En el siguiente link encontrarás un manual para compilar en PIC C Compiler.
4. Abre el Software Tiny Bootloader y programa el código que descargaste o compilaste en el módulo. En el siguiente link encontrarás el manual de usuario para el Software Tiny Bootloader.
5. Al terminar de programar, el módulo se reiniciará y el programa de esta práctica se ejecutará.
Diagrama esquemático

Código
Descargas
A continuación podrás descargar los archivos necesarios para el desarrollo de esta práctica.
